Robocon 2015
Badminton Robot
Robot that can play badminton with a human player.
Robot will serve the shuttlecock and return the shuttlecock to the opponent. It will also predict the shuttlecock trajectory and move to the correct position to return the shuttlecock.
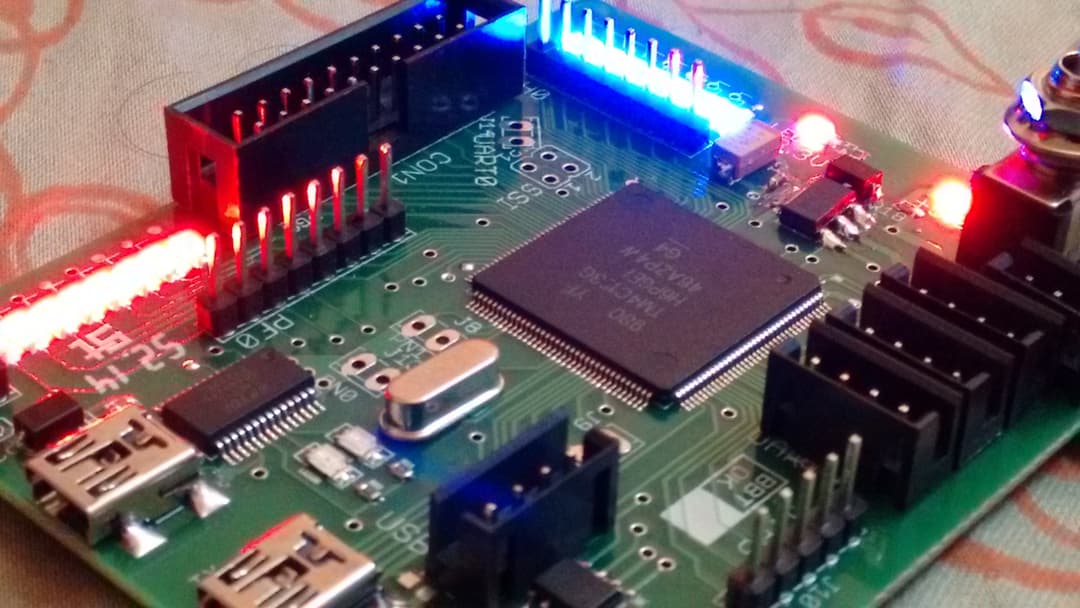
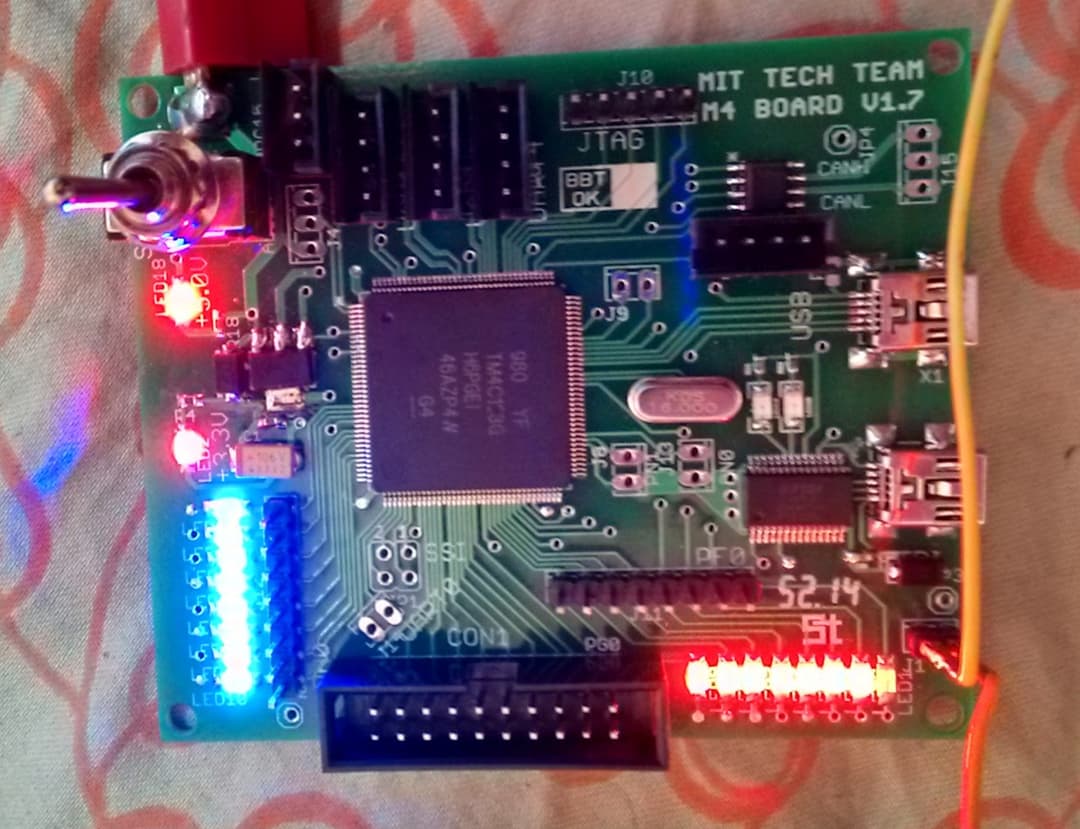
Embedded Boards Used
ARM Cortex M4 Based Boards
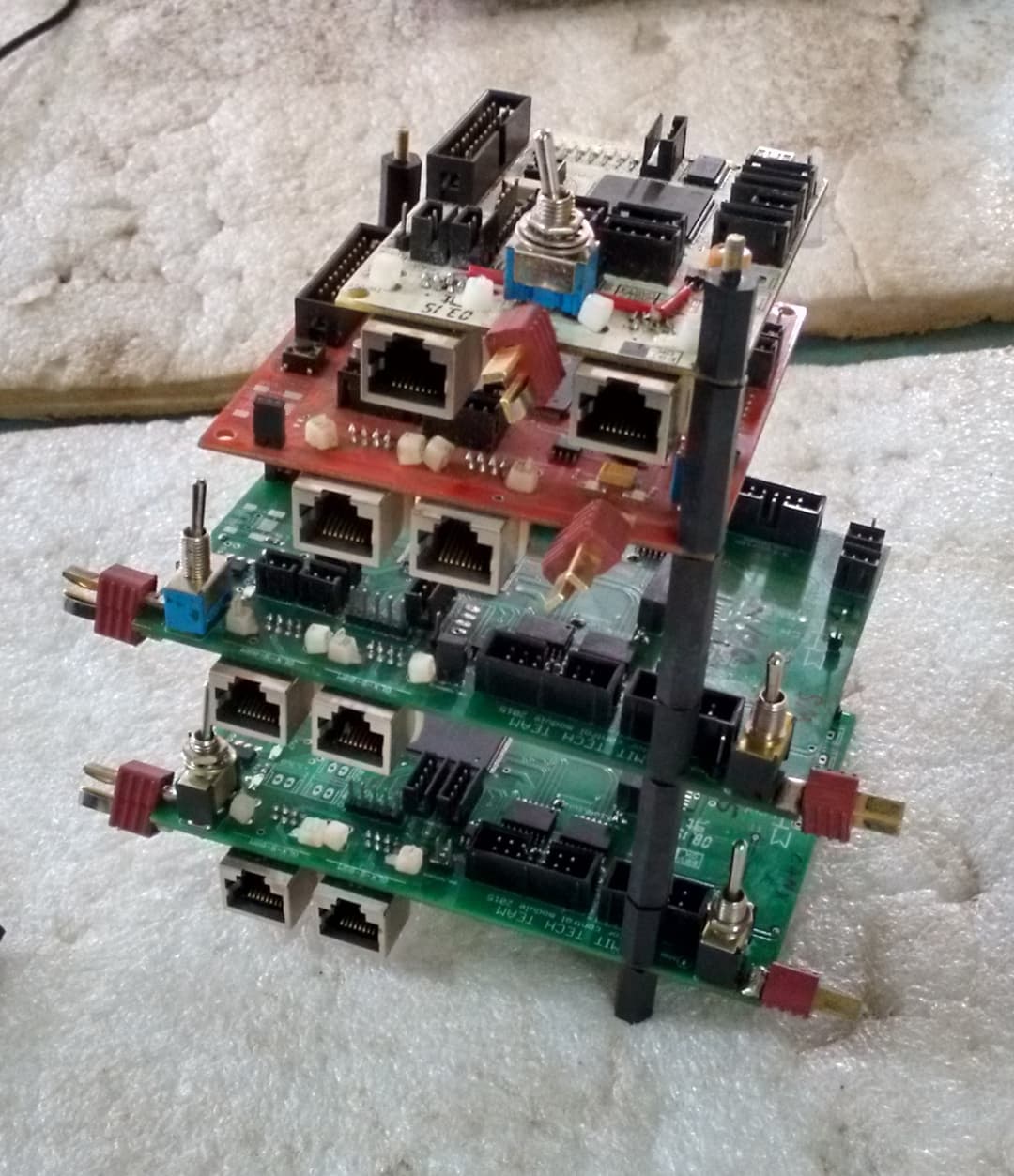
Developed custom boards with ARM Cortex M4 microcontroller, with sensors and motor drivers. Also used stackable boards for modularity.
Mechanism
Automatic Service Mechanism
Pneumatic piston to drop the shuttlecock and proximity sensors to detect the shuttlecock. With a precise motor control to vary the shuttlecock trajectory.
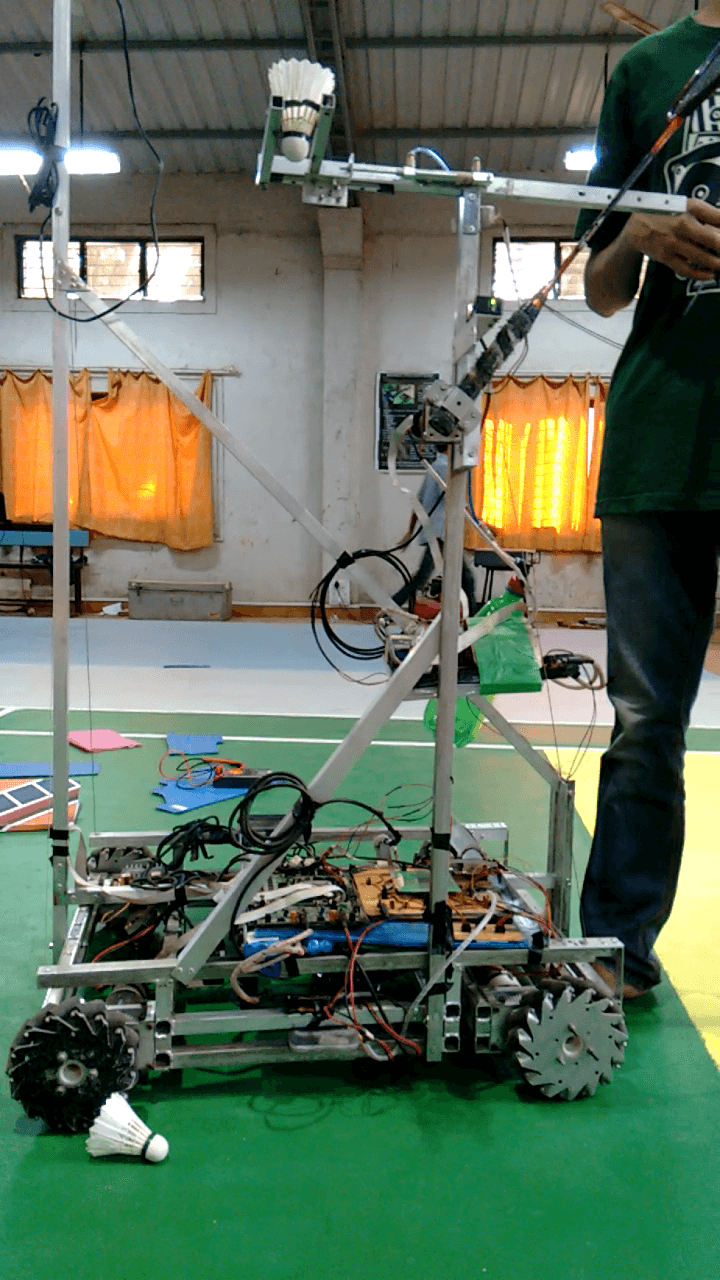
Hitting Shuttlecock
Robot in Action
Robot hitting Shuttlecock
Manually Guided Robot that can play badminton with a human player.
Multiple sensors are used to track the shuttlecock and the opponent. The robot can also do a service and return the shuttlecock to the opponent.