For Underwater Exploration
Remote Operated Vehicle
Remote Operated Vehicle
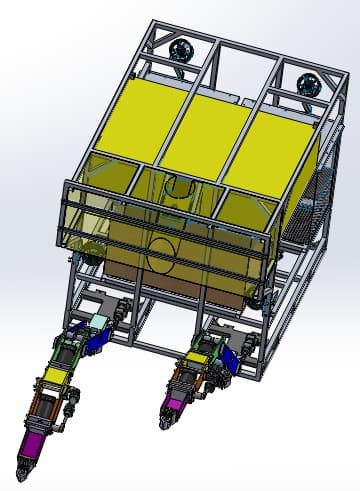
Ethernet based communication setup with a tethered connection to the surface. The ROV is equipped with cameras and two arms for manipulation. Ballast tanks are used for buoyancy control.
Two Raspberry Pi's are used for control with a custom PCB for motor control and sensors. Pressure sensors are used for depth control.

Project sponsored by Aker Solutions
Underwater Exploration
Controlled remotely from the surface, the ROV is used for underwater exploration. It is equipped with cameras and two arms for manipulation.