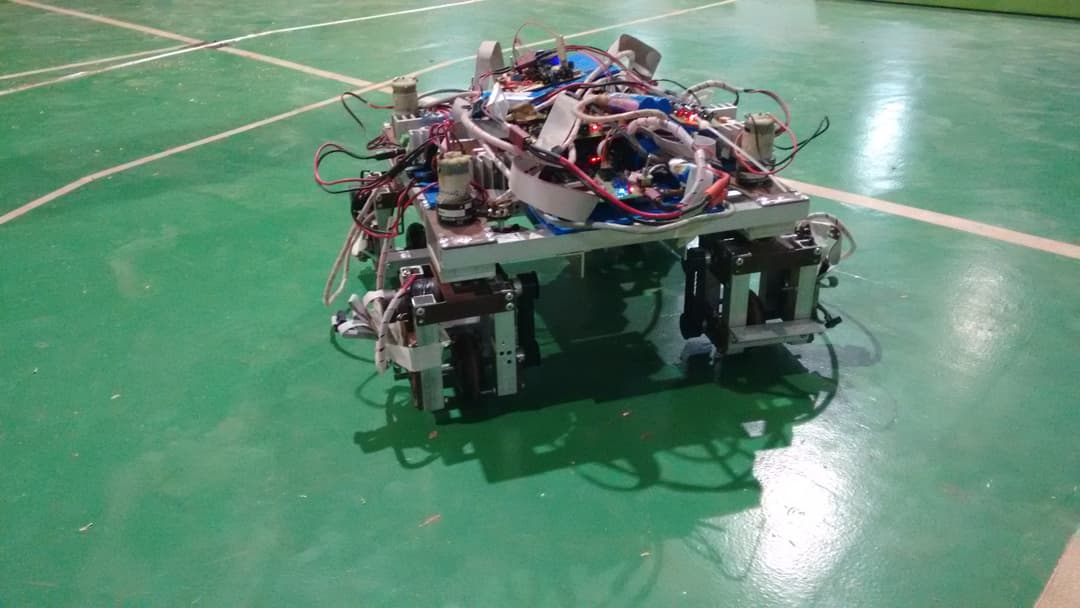
Four wheel module
Swerve Drive System
Achieved precise control with Absolute Encoders and PID control
Used Absolute Encoders for precise control of the motors. Motor control was done using PID control and the robot could move in any direction.
Connected with a PS3 controller wirelessly and could move in any direction with the joystick.
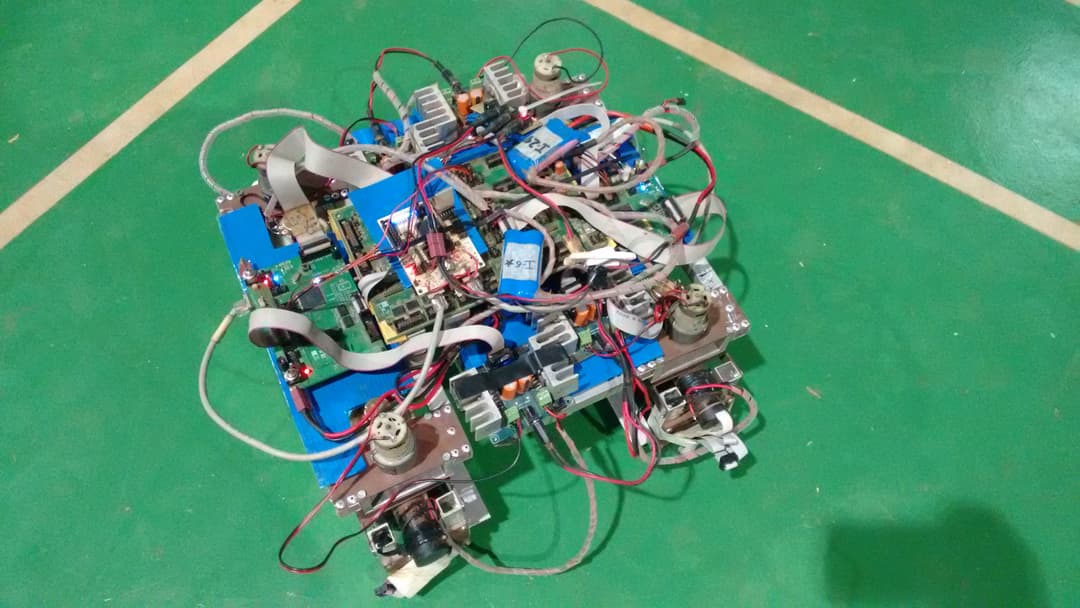

Swerve Drive
Sync Steering and Drive Motors
Software based control is implemented to sync the steering and drive motors. Using CAN bus communication, the motors are controlled with a single controller.
In Action
4 Wheel Independent Drive
Achieved precise control with Absolute Encoders and PID control
Used Absolute Encoders for precise control of the motors. Motor control was done using PID control and the robot could move in any direction.
Connected with a PS3 controller wirelessly and could move in any direction with the joystick.